本网讯(文/吴桐)近日,我校“新能源智能汽车关键技术”学科创新团队成员杨正才博士、吴桐博士在国内汽车行业顶级期刊《汽车工程》(中国科协高质量期刊分级:汽车工程领域T1类)分别发表题为“考虑时变参考和转向延迟的自动驾驶车辆轨迹跟踪控制方法”和“面向转向制动工况的制动力动态分配策略”的研究论文。我校为第一单位,吉林大学、常州工学院为合作单位。
针对传统的线性二次型调节器(LQR)方法无法考虑时变参考和转向延迟等问题,论文“考虑时变参考和转向延迟的自动驾驶车辆轨迹跟踪控制方法”建立了轨迹跟踪误差动力学模型,设计了一种高实时性时变参考等式约束模型预测(EqLPV-MPC)控制器,降低了优化求解计算量。实验结果表明:双移线工况下,所设计的EqLPV-MPC控制器可以将汽车横向位移误差控制在0.1m以内、航向角误差控制在1度以内。与LQR控制器相比,EqLPV-MPC控制器具有更高的轨迹跟踪精度。
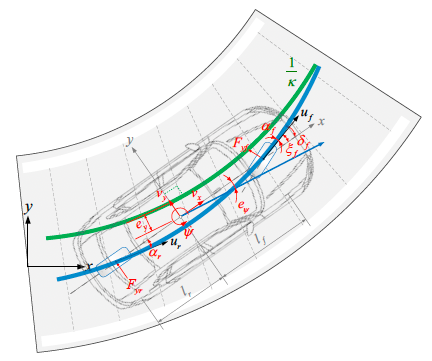
轨迹跟踪误差动力学模型
受轮胎侧偏、载荷横移等因素影响,汽车在转向制动工况下的动力学行为比直线制动更复杂。论文“面向转向制动工况的制动力动态分配策略”以电子机械式线控制动为载体,提出了转向制动工况下的制动力分配策略。与目前业内普遍采用的理想制动力分配曲线(I-曲线)相比,所提出的控制策略能够根据汽车行驶工况、载荷状态和路面附着条件动态调节制动力分配比例,提升了汽车在转向制动工况下的循迹性、保障了行车安全。
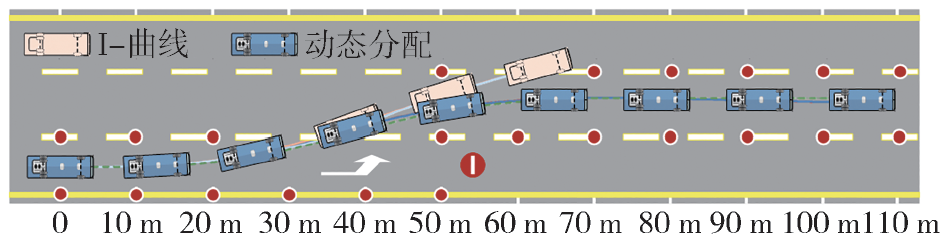
低附着路面、单移线工况实验结果:汽车行驶轨迹对比
据悉,“新能源智能汽车关键技术”学科创新团队依托汽车动力传动与电子控制湖北省重点实验室、东风HUAT智能汽车产业学院,致力于解决汽车智能化、电动化关键技术问题及其背后的科学问题。自2023年11月组建以来,团队先后获得湖北省科技进步三等奖一项、中国物流与采购联合会科技进步一等奖一项,发表高水平论文10余篇、申请国家发明专利10余项。此外,团队联合湖北大运汽车有限公司、东科克诺尔商用车制动技术有限公司等企业申报并获批十堰市企校联合创新中心、十堰市科技创新战略团队,为进一步深化产教融合协同育人,实现教育链、人才链、产业链和创新链有机衔接注入新动能。(审稿 尹长城)






